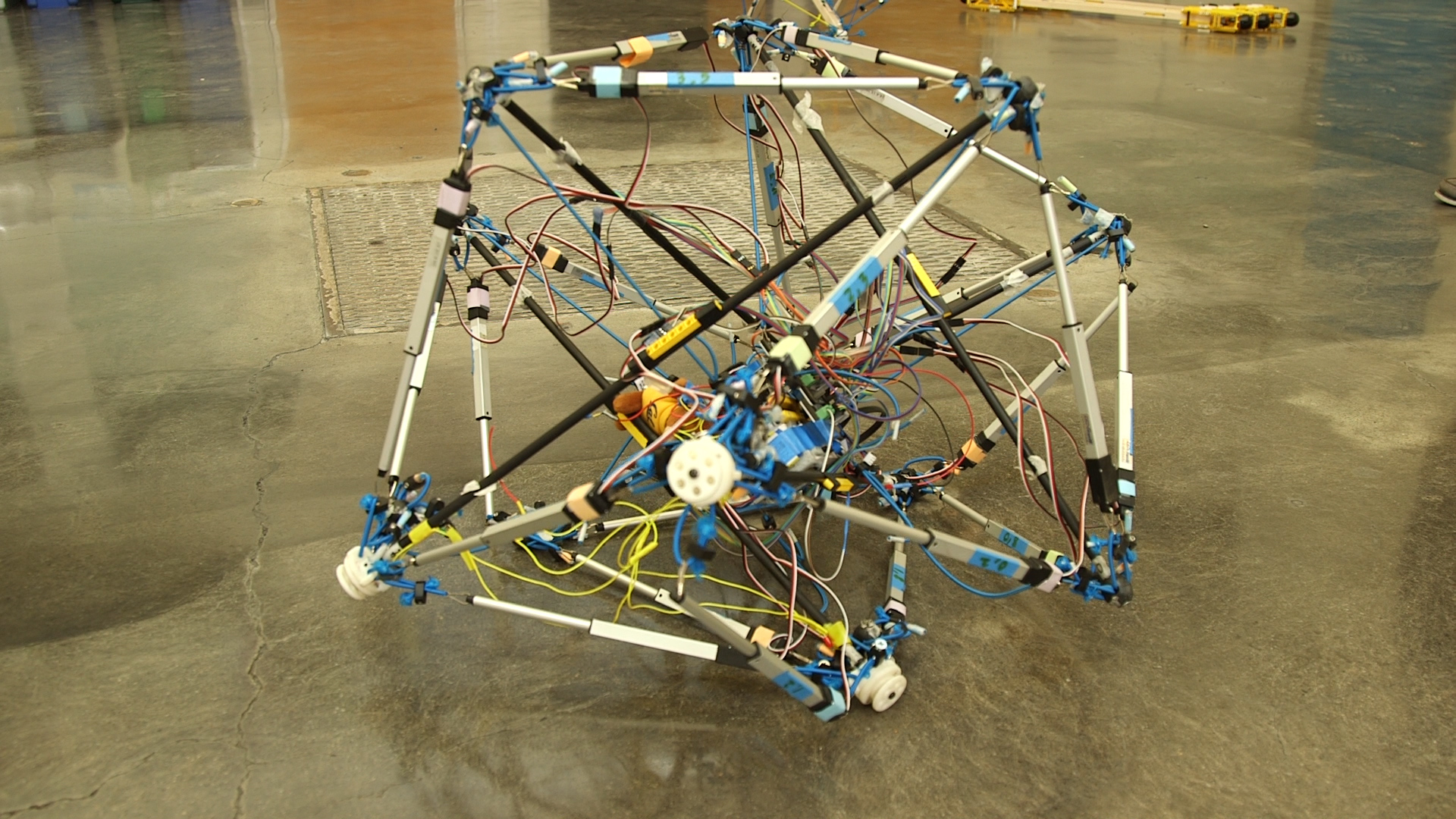
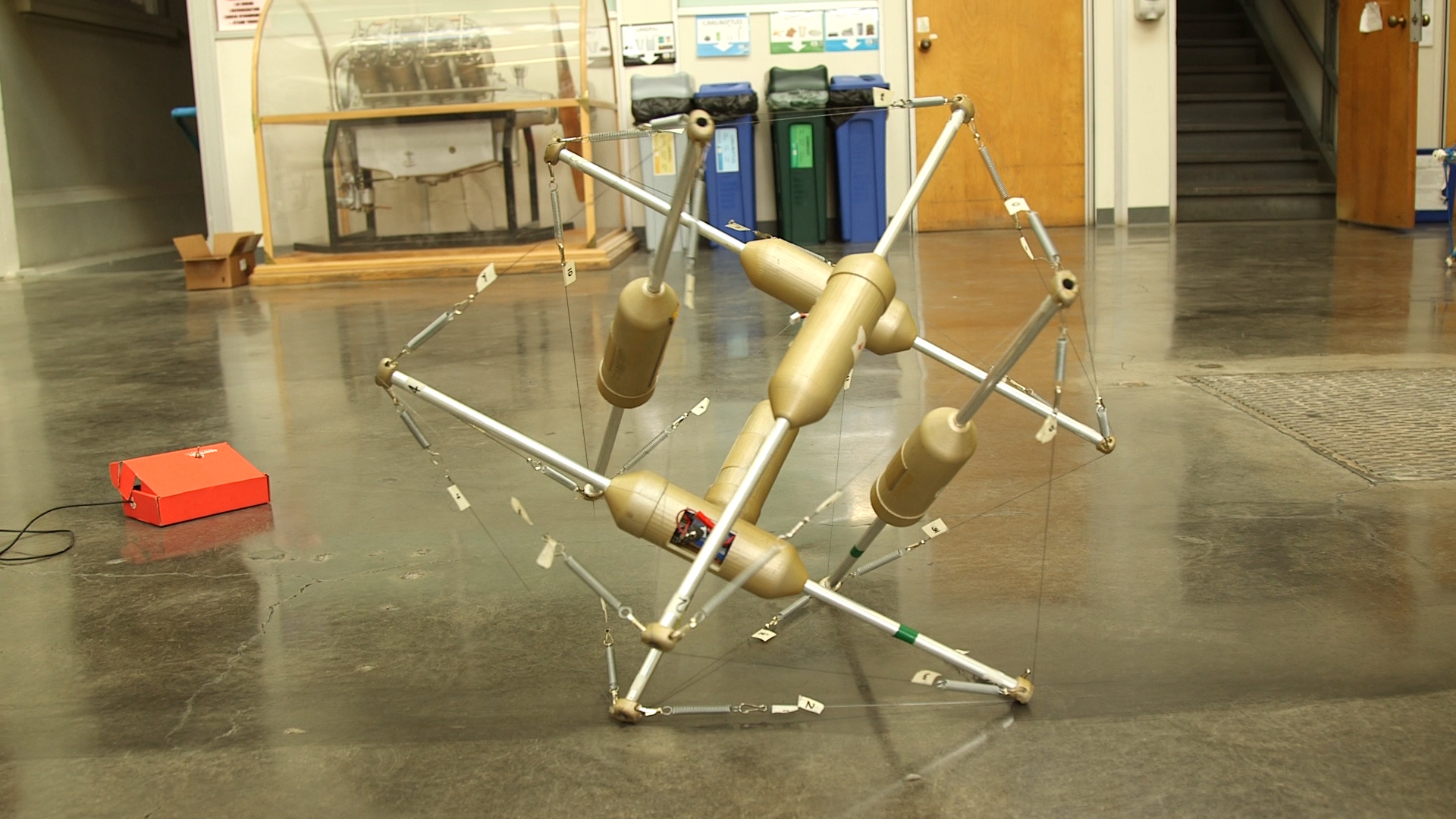
Alice Agogino is a mechanical engineering professor at the University of California at Berkeley, and she and her lab are among a group of engineers that are designing what might be the next generation of space exploring robots. These don’t look like the Mars rovers with the big wheels that you may be thinking of-- oh no, they are totally different-- and that’s the point. These robots actually look like a ball of rods and cables, and they are modelled after a baby toy, of all things.

It all began when Vytas SunSpiral, a robotics researcher and his colleague Adrian Agogino (Alice Agogino’s son and also a robotics researcher) were brainstorming how to improve space robotics. They happened to be playing with a baby toy called a Skwish. The skwish is a type of structure known as a tensegrity structure. In tensegrity structures, rigid parts like wooden rods or steel beams aren’t directly connected to one another by nails or screws, but rather are held together by wires, cables, chains or some kind of band. As a baby toy they are fun to play with because you can squash them and throw them and they won’t break. They can easily distribute and absorb forces that result from impact. So after throwing this toy on the ground and observing its ability to remain intact, SunSpiral’s team realized this type of structure might be a good landing structure for a space robot.
Traditional space robots, like the Mars rovers are really difficult to land because you have a pretty delicate robot approaching a planet at really high speeds. As a result, engineers spend a lot of time and money making sure nothing breaks during landing. In fact, landing Curiosity, the current robot on Mars, has been nicknamed the 7 minutes of terror. Traditional rovers are also somewhat limited in the places they can explore. For example, rock walls or cliff edges are too risky for them. If one were to fall down a steep slope then it could break rendering the rover useless. Sharp rocky surfaces can also tear or puncture the robot’s wheels making it difficult to move.
Robots based on tensegrity structures might be easier to land and cheaper to make. They could possibly even explore some of the more challenging surfaces.

“So tensegrity rovers offer a lot of advantages over the traditional wheeled-structured rovers. They’re lighter weight, they’re more robust, they can handle lot of damage because the load is distributed among the tensile elements,” explains Alice Agogino.